
Intro
Enhance visual navigation with sim2real transfer, bridging simulation and reality gaps, leveraging domain adaptation and reinforcement learning for seamless robot navigation and control.
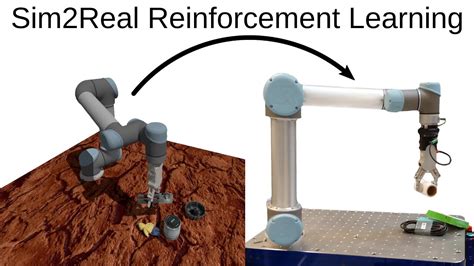
Sim2real transfer for visual navigation has become a crucial aspect of robotics and artificial intelligence research. The ability to transfer knowledge and skills learned in simulation environments to real-world scenarios is essential for the development of autonomous systems that can navigate and interact with complex environments. In recent years, significant advancements have been made in sim2real transfer, enabling robots to learn from simulated experiences and apply that knowledge to real-world situations.
The importance of sim2real transfer lies in its potential to reduce the time and cost associated with training robots in real-world environments. Simulation environments can be designed to mimic real-world scenarios, allowing robots to learn and practice navigation skills in a safe and controlled manner. This approach also enables researchers to test and evaluate different navigation strategies and algorithms in a virtual environment before deploying them in the real world. Furthermore, sim2real transfer has the potential to improve the robustness and adaptability of navigation systems, enabling them to handle unexpected events and changes in the environment.
As researchers continue to explore the possibilities of sim2real transfer, several key challenges must be addressed. One of the primary challenges is the reality gap, which refers to the differences between the simulated and real-world environments. The reality gap can be caused by various factors, including differences in lighting, texture, and geometry. To overcome this challenge, researchers are developing new methods for simulating real-world environments and improving the transfer of knowledge from simulation to reality. Another challenge is the need for large amounts of labeled data, which can be time-consuming and expensive to collect. To address this challenge, researchers are exploring the use of unsupervised and semi-supervised learning methods, which can learn from unlabeled or partially labeled data.
Introduction to Sim2real Transfer
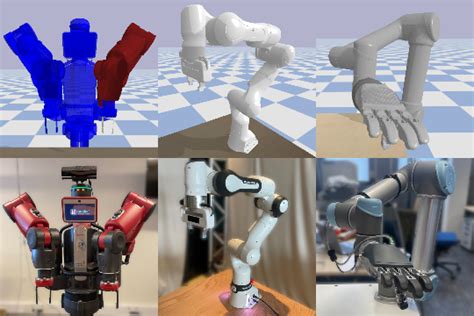
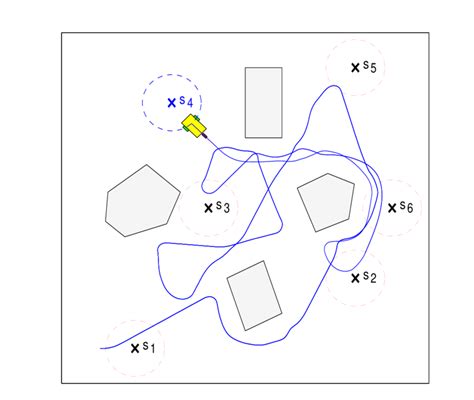
Sim2real transfer for visual navigation involves the use of simulation environments to train robots to navigate and interact with complex environments. The goal of sim2real transfer is to enable robots to learn from simulated experiences and apply that knowledge to real-world situations. This approach has several advantages, including reduced training time and cost, improved safety, and increased flexibility. Sim2real transfer can be applied to various robotics applications, including autonomous vehicles, drones, and humanoid robots.
Benefits of Sim2real Transfer
The benefits of sim2real transfer for visual navigation are numerous. Some of the key benefits include: * Reduced training time and cost: Simulation environments can be designed to mimic real-world scenarios, allowing robots to learn and practice navigation skills in a safe and controlled manner. * Improved safety: Simulation environments enable researchers to test and evaluate different navigation strategies and algorithms in a virtual environment before deploying them in the real world. * Increased flexibility: Sim2real transfer enables robots to learn from simulated experiences and apply that knowledge to real-world situations, improving their adaptability and robustness. * Improved performance: Sim2real transfer can improve the performance of navigation systems by enabling them to handle unexpected events and changes in the environment.Working Mechanisms of Sim2real Transfer
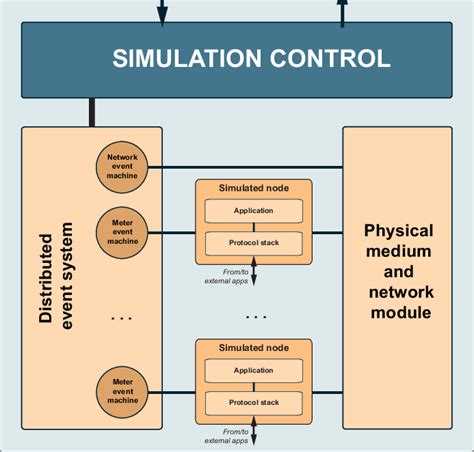
The working mechanisms of sim2real transfer for visual navigation involve the use of simulation environments to train robots to navigate and interact with complex environments. The process typically involves the following steps:
- Simulation environment design: The simulation environment is designed to mimic real-world scenarios, including lighting, texture, and geometry.
- Robot training: The robot is trained in the simulation environment using various navigation strategies and algorithms.
- Knowledge transfer: The knowledge and skills learned by the robot in the simulation environment are transferred to the real world.
- Real-world testing: The robot is tested in the real world to evaluate its performance and adaptability.
Steps for Implementing Sim2real Transfer
The steps for implementing sim2real transfer for visual navigation include: * Designing a simulation environment that mimics real-world scenarios * Training a robot in the simulation environment using various navigation strategies and algorithms * Transferring the knowledge and skills learned by the robot in the simulation environment to the real world * Testing the robot in the real world to evaluate its performance and adaptabilityApplications of Sim2real Transfer

Sim2real transfer for visual navigation has various applications in robotics and artificial intelligence. Some of the key applications include:
- Autonomous vehicles: Sim2real transfer can be used to train autonomous vehicles to navigate and interact with complex environments, including roads, traffic, and pedestrians.
- Drones: Sim2real transfer can be used to train drones to navigate and interact with complex environments, including obstacles, weather conditions, and changing lighting.
- Humanoid robots: Sim2real transfer can be used to train humanoid robots to navigate and interact with complex environments, including stairs, doors, and human-robot interaction.
Real-World Examples of Sim2real Transfer
Some real-world examples of sim2real transfer for visual navigation include: * Autonomous vehicle navigation: Companies like Waymo and Tesla are using sim2real transfer to train autonomous vehicles to navigate and interact with complex environments. * Drone navigation: Companies like DJI and Skydio are using sim2real transfer to train drones to navigate and interact with complex environments. * Humanoid robot navigation: Researchers are using sim2real transfer to train humanoid robots to navigate and interact with complex environments, including stairs, doors, and human-robot interaction.Challenges and Limitations of Sim2real Transfer
Sim2real transfer for visual navigation has several challenges and limitations. Some of the key challenges include:
- Reality gap: The differences between the simulated and real-world environments can cause the reality gap, which can affect the performance and adaptability of navigation systems.
- Limited data: The lack of large amounts of labeled data can limit the performance and adaptability of navigation systems.
- Complexity: The complexity of simulation environments and navigation algorithms can make it difficult to implement sim2real transfer.
Future Directions for Sim2real Transfer
The future directions for sim2real transfer for visual navigation include: * Improving the realism of simulation environments * Developing new methods for simulating real-world environments * Improving the transfer of knowledge from simulation to reality * Developing new navigation strategies and algorithms that can adapt to changing environmentsSim2real Transfer Image Gallery



As researchers continue to explore the possibilities of sim2real transfer for visual navigation, it is essential to address the challenges and limitations associated with this approach. By improving the realism of simulation environments, developing new methods for simulating real-world environments, and improving the transfer of knowledge from simulation to reality, we can create more efficient and effective navigation systems. We invite readers to share their thoughts and experiences with sim2real transfer for visual navigation, and we encourage them to explore the possibilities of this approach in their own research and applications. By working together, we can create a future where robots and autonomous systems can navigate and interact with complex environments with ease and precision.